Giải chuyên đề học tập Tin học 10 Cánh diều định hướng khoa học máy tính bài 3: Thực hành lập trình điều khiển tay gắp robot giáo dục
Dưới đây là phần hướng dẫn giải chi tiết cụ thể cho bộ chuyên đề học tập Tin học 10 Cánh diều định hướng khoa học máy tính bài 3: Thực hành lập trình điều khiển tay gắp robot giáo dục. Lời giải đưa ra ngắn gọn, cụ thể sẽ giúp ích cho em các em học tập ôn luyên kiến thức tốt, hình thành cho học sinh phương pháp tự học, tư duy năng động sáng tạo. Kéo xuống để tham khảo
Khởi động
Câu hỏi. Robot có các loại động cơ: động cơ một chiều, động cơ servo và động cơ bước. Theo em, để điều khiển tay gắp, robot thường dùng loại động cơ nào?
Tay gắp giúp robot thực hiện các nhiệm vụ gắp và di chuyển đồ vật như: vận chuyển hàng, phân loại sản phẩm,… Tùy ứng dụng mà tay gắp sẽ được thiết kế sử dụng phù hợp. Trong robot giáo dục, việc sử dụng động cơ servo giúp tay gắp hoạt động linh hoạt và dễ dàng hơn.
Vận dụng
Câu hỏi vận dụng
Bài 1. Em hãy lập trình lại robot tiến về phía trước tiến về phía trước 20cm và gắp vật.
Chương trình đó là:

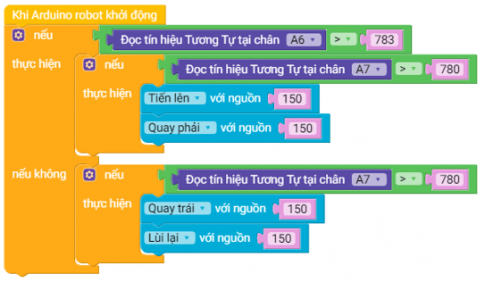
Bài 2. Sử dụng cảm biến hồng ngoại, em hãy lập trình để robot di chuyển theo vạch đen trên nền nhà màu sáng.
Đầu tiên ta cần lấy thông số để nhận biết khi nào các mắt bên trong và bên ngoài đường đen. Chúng ta sẽ chỉ cần dùng hai mắt ở giữa là A6 và A7 với các đường đơn giản.
Chương trình mẫu:

Sau đó chúng ta đo thông số khi các mắt nằm trong và ngoài đường đen rồi tính trung bình cho từng mắt. Ví dụ với 2 mắt A6, A7 sau:
Mắt | Trong đường đen | Ngoài đường đen | Giá trị trung bình |
A6 | 870 | 656 | 763 |
A7 | 903 | 701 | 802 |
Tiếp theo chúng ta tiến hành so sánh với giá trị trung bình vừa có được:
- Nếu mắt A6 > giá trị trung bình ⇒ Mắt A6 đang trong vạch đen và ngược lại.
- Nếu mắt A7 > giá trị trung bình ⇒ Mắt A7 đang trong vạch đen và ngược lại.
Chúng ta có hai mắt nên sẽ có 3 trường hợp xảy ra khi để robot trên vạch đen.
A6 | A7 |
Trong đường đen | Trong đường đen |
Ngoài đường đen | Trong đường đen |
Trong đường đen | Ngoài đường đen |